Lab and Center Spotlights — Control Systems
Smart Infrastructure Lab
Mahnoosh Alizadeh
Networked Systems and Game Theory Lab
Jason R. Marden
Sensor and Robotic Network Lab
Yasamin Mostofi
Smart Infrastructure Lab
Mahnoosh Alizadeh
The Smart Infrastructure Lab is focused on designing real-time control algorithms for operating our societal-scale infrastructure systems through the use of information technology and a more active role for humans in the control loop. Our objective is to improve sustainability, reliability, efficiency, and propose disruptive new methods to address the challenges of rapid urbanization. Some main areas of current focus are as follows:
 Energy Management Systems:
Energy Management Systems:
To enable a successful integration of renewable technologies and also improve power grid reliability, our lab studies methods to motivate changes in electricity use by end-use customers in response to changes in the availability of supply and the dynamic state of the grid. We design distributed monitoring and control loops to learn customers' behavior and enable them to adjust their electricity demand in real-time, as well as pricing mechan isms for wholesale electricity markets in the presence of flexible demand.
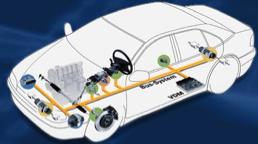
 Electric and Driverless Transportation Systems: A growing population of Electric Vehicles (EV), along with disruptive technologies fast happening in the area of driverless cars and shared vehicle fleets, are expected to create synergies that can revolutionize our future transportation systems.
In our research, we study the mobility needs of individuals or vehicle fleets in order to design methods that guide EV drivers (or manage autonomous EV fleets) towards using transportation and charging infrastructure systems more efficiently.
Electric and Driverless Transportation Systems: A growing population of Electric Vehicles (EV), along with disruptive technologies fast happening in the area of driverless cars and shared vehicle fleets, are expected to create synergies that can revolutionize our future transportation systems.
In our research, we study the mobility needs of individuals or vehicle fleets in order to design methods that guide EV drivers (or manage autonomous EV fleets) towards using transportation and charging infrastructure systems more efficiently.
Interdependent Networked Infrastructure Systems: Our infrastructure systems depend on each other to function. For example, EV owners introduce couplings between power and transportation systems. Our goal is to provide insights as to how the operations of multiple networked infrastructure systems can be coordinated, and propose solutions that can enhance reliability and efficiency.
Smart cities: Engineers can now access massive amounts of data about the daily activities and needs of citizens as well as the availability of resources in urban environments. Our lab studies dynamic monitoring and resource allocation algorithms that can systematically gather and use this data to better use a city's assets and improve its residents' lives.
Professor Alizadeh's:
- Smart Infrastructure Lab
- Personal Website
Networked Systems and Game Theory Lab
Jason R. Marden
Dr. Marden's research focuses on the area of feedback control and systems theory with an emphasis on the development and analysis of game theoretic methods for the coordination of large scale distributed systems. His work is motivated by the fundamental challenges associated with the coordination of multiagent systems with applications including distributed traffic routing, dynamic resource allocation, wind farm control, and sensor networks.
The lab's main areas of research focus on the following three classes of systems:
 Multiagent Engineered Systems: An unmanned system consists of a group of autonomous engineered decision-makers, or agents, that are designed to achieve a collective objective without the need for global intervention. For example, consider the problem of sensor coverage where the goal is to effectively allocate a collection of sensors over a mission space under the constraint that each individual sensor must make independent control decisions in response to limited information about the system as a whole (e.g., mission space or behavior of other agents). The research conducted in my lab is geared at deriving new methods for controlling such multi-agent systems and characterizing how constraints on the control architectural impacts the achievable performance guarantees.
Multiagent Engineered Systems: An unmanned system consists of a group of autonomous engineered decision-makers, or agents, that are designed to achieve a collective objective without the need for global intervention. For example, consider the problem of sensor coverage where the goal is to effectively allocate a collection of sensors over a mission space under the constraint that each individual sensor must make independent control decisions in response to limited information about the system as a whole (e.g., mission space or behavior of other agents). The research conducted in my lab is geared at deriving new methods for controlling such multi-agent systems and characterizing how constraints on the control architectural impacts the achievable performance guarantees.
 Networked Social Systems: Developing the infrastructure necessary to serve the needs of our community is a dominant engineering principle. A crucial design challenge associated with this task is ensuring that this infrastructure is utilized in an efficient manner. This challenge arises from the well-known fact that uninfluenced social systems can lead to highly inefficient system behavior, e.g., transportation systems. Accordingly, the influence and coordination of social behavior is a fundamental challenge that engineers must account for. The research conducted in my lab is geared at deriving methods for robust social coordination with applications to transportation systems, auctions, and inventory pricing. The need for robustness centers on the uncertainty pertaining to how individuals in society will respond to influencing mechanisms, e.g., taxes.
Networked Social Systems: Developing the infrastructure necessary to serve the needs of our community is a dominant engineering principle. A crucial design challenge associated with this task is ensuring that this infrastructure is utilized in an efficient manner. This challenge arises from the well-known fact that uninfluenced social systems can lead to highly inefficient system behavior, e.g., transportation systems. Accordingly, the influence and coordination of social behavior is a fundamental challenge that engineers must account for. The research conducted in my lab is geared at deriving methods for robust social coordination with applications to transportation systems, auctions, and inventory pricing. The need for robustness centers on the uncertainty pertaining to how individuals in society will respond to influencing mechanisms, e.g., taxes. Human Agent Collaborative Systems: A prevalent theme in current and future system designs is the integration of both human and engineered decision makers. This integration brings a host of new control challenges that are not sufficiently addressed in the existing literature. For example, the use of both manned and unmanned aircrafts in military surveillance missions would provide strategic advantages over purely manned systems; however, current control strategies are not sufficient to deal with the substantial concerns of risk, safety, and coordination. The research conducted in my lab is geared at deriving approaches for the integration of human decision-making into distributed engineering systems that effectively balances the risk versus reward trade-offs that is accompanied by this merger.
Human Agent Collaborative Systems: A prevalent theme in current and future system designs is the integration of both human and engineered decision makers. This integration brings a host of new control challenges that are not sufficiently addressed in the existing literature. For example, the use of both manned and unmanned aircrafts in military surveillance missions would provide strategic advantages over purely manned systems; however, current control strategies are not sufficient to deal with the substantial concerns of risk, safety, and coordination. The research conducted in my lab is geared at deriving approaches for the integration of human decision-making into distributed engineering systems that effectively balances the risk versus reward trade-offs that is accompanied by this merger.
Professor Marden's:
- Networked Systems and Game Theory Lab
- Personal Website

Sensor and Robotic Network Lab
Yasamin Mostofi
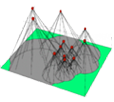
Autonomous mobile robotic networks can have a tremendous impact in many different areas such as disaster relief, emergency response, and national security. In such networks, a group of unmanned vehicles with limited local sensing, processing, communications, and actuation capabilities are given a task to perform jointly. Each node needs to constantly plan and adapt its trajectory, in order to sense and gather as much information from the environment as possible while maintaining the needed connectivity for cooperation. Its given resources such as energy, time or bandwidth are further very limited, while the operation environment presents uncertainty for sensing, communications and navigation.
Thus, in order to realize the full potentials of a robotic network, we need a foundational understanding of the interplay between sensing, communications and navigation in these systems, which is the main motivation for the ongoing work in our lab. More specifically, we work on developing a new multi-disciplinary paradigm for the optimum design, task assignment and use of limited resources in robotic networks. Our current research thrusts include communication-aware navigation and decision making, compressive sensing and control, obstacle mapping, robotic routers, and cooperative information processing. By utilizing tools from control, robotics, communications, and signal processing, and co-optimizing the sensing, communications and navigation aspects of these problems, we have shown that considerable performance improvement can be achieved.
In one line of work, for instance, we have developed the mathematical foundations of communication-aware motion planning, a term we use to refer to a navigation strategy in which each robot considers not only the impact of motion decisions on its sensing, but also considers realistic probabilistic communication prediction metrics when planning its trajectory. In order for each node to do so, it needs to have an assessment of the link quality at the locations that it has not yet visited. Thus, we have further brought an understanding to the fundamentals of wireless channel predictability, which is key to communication-aware navigation.
In another line of work, we have shown how a robotic network can build an understanding of its environment with minimal sensing and in non-conventional ways, by exploiting the sparse representation of the information in another domain. For instance, we have shown that through proper motion design and by exploiting the sparse representation of the environment, it is indeed possible for the robotic network to see through the walls and build a spatial map of occluded obstacles, using only a small number of wireless measurements.
Overall, our work allows the agents to better understand their environment with minimal sensing, optimize the flow of information between them, and successfully operate under uncertainty and resource constraints.
Professor Mostofi's:
- Sensor and Robotic Network Lab
- Personal Website
Research Center Spotlight — Control, Dynamical Systems & Computation (CCDC)
Robotics Lab
Katie Byl
Scientific Computing Group
Shiv Chandrasekaran
Networked Control Laboratory
João Hespanha

Research Center Spotlight — Center for Control, Dynamical Systems & Computation (CCDC)
The Center: The Center for Control, Dynamical Systems and Computation (CCDC) was founded in 1991 to facilitate interdepartmental research in control engineering, dynamical systems, and computation and to provide a forum for the exchange of ideas through lectures, seminars, conferences, scholarly meetings, and publications. Currently, the center brings together faculty, students, and visitors from the Departments of Electrical, Mechanical, and Chemical Engineering, Mathematics, Statistics and Applied Probability, and Computer Science.
Activities: The Center focuses on initiating and coordinating research projects with cross-disciplinary investigations and applications to industrial, environmental, transportation, and defense systems. To that end, the Center organizes a weekly seminar series that brings in domain experts, workshops, short courses, publishes a technical report series, and sponsors several fellowships and awards. The Center has a comprehensive graduate program in which students can pursue their studies across several engineering departments. The Center also offers post-doctoral positions and regularly hosts visiting faculty to facilitate inter-institutional and international cooperation.
Cooperation: The Center strives to enable cross-disciplinary teamwork in which theoretical concepts, computational methods, and engineering design are organically merged. Interactions among faculty create an environment in which members benefit from the expertise across several engineering disciplines, applied mathematics and scientific computation. The Center’s collaborative nature is evidenced in the frequent cross listing of courses, as well as joint projects and publications.
Areas of expertise within the center include: nonlinear control, robust control, optimal control, process control, hybrid systems, system identification, stochastic control, distributed control, systems biology, dynamical systems, multi-agent systems, power networks, autonomous vehicles, robotics, and scientific computing.

Robotics Lab
Katie Byl
Research Interests: Robotics, Dynamics, Locomotion, Control, Autonomous Systems, Learning
In our lab group, we study the interplay between passive dynamics and active control in achieving two of the most fundamental challenges in autonomous robotics: locomotion & manipulation.
The three central applications on which we are currently focused are: rough-terrain legged locomotion; maneuverable flapping-wing and rotary flight; and variable-compliance manipulation.
Our overall approach in all work involves developing simplified dynamic models, deriving control laws for achieving particular motions and limit cycle behaviors, and predicting and optimizing reliability. This last aspect is both critical and challenging, because robots in real-world environments are typically subject to significant underactuation and stochasticity. By contrast, the classic study of robotics is founded on having well-characterized and deterministic ("robotic") behaviors from our machines.
Within robotics, our work essentially focuses on the mid-level control problem of getting a desired dynamic response for a body's overall motion through exploitation of both physical impedance (i.e., stiffness, mass and damping) and active control. We invite academic and industry collaboration on both higher-level tasks, such as vision or motion planning, and on low-level problems, such as variable-impedance actuation, real-time control platforms, or novel sensing solutions.
Professor Byl's:

Scientific Computing Group
Shiv Chandrasekaran
Historically computers were first used for the numerical solution of partial differential equations (PDEs) that arise in engineering design work. Today the desire to create "virtual labs" where engineers can quickly design, test and tune complex designs on a computer, is a major motivator for designing extremely fast, memory efficient algorithms for physical simulations. This is the aim of the Scientific Computing Group.
To design fast algorithms for PDEs we have to exploit special patterns that arise in these problems. The patterns are complicated and their description requires tools from functional analysis, harmonic analysis, approximation theory, elliptic PDE theory, linear algebra and computer science.
We have attacked the problem on several fronts. At the numerical linear algebra end, we have worked on exploiting low-rank micro-structure in matrices to speed-up the solution of large linear systems of equations.
At the functional analysis end, we have worked on developing new breakthrough ideas on high-order linear polynomial approximators, and used these to develop new classes of highly efficient high-order schemes for PDEs.
However, we are still far from delivering a virtual lab-on-a-computer to engineers. There are many examples of PDEs where the current state-of-the-art can be dramatically improved. To achieve this involves the clever synthesis of many existing ideas, and more importantly, new ones that take better advantage of the patterns present. This is an exciting field at the junction of mathematics, computing and physics, and we expect many more breakthroughs ahead.
Professor Chandrasekaran's:
Networked Control Laboratory
João Hespanha
As computers, digital networks, and embedded systems become ubiquitous and increasingly complex, one needs to understand the coupling between logic-based components and continuous physical systems. This prompted a shift in the standard control paradigm — in which dynamical systems were typically described by differential or difference equations — to allow the modeling, analysis, and design of systems that combine continuous dynamics with discrete logic. This new paradigm is often called hybrid, impulsive, or switched control.
While some of our work on hybrid systems is of a theoretical nature, it is motivated by several high-impact application areas:
- Network Control Systems (NCSs) are spatially distributed systems in which the communication between sensors, actuators and controllers occurs through a shared band-limited digital communication network. NCSs have been finding application in a broad range of areas such as the automotive and aerospace industries, mobile sensor networks, remote surgery, automated highway systems, and unmanned aerial vehicles.
- Cooperative control of autonomous agents refers to the control of ground, aerial or aquatic robots so as to perform tasks that require a significant amount of information gathering, data processing, and decision making, without explicit human control. These tasks include environmental monitoring, search and rescue operations for disaster response, law enforcement activities, crop monitoring and spraying, etc.
- Systems biology seeks to understand living organisms by modeling and analyzing the complex interactions of genes, proteins, and other cell elements. A key goal of systems biology is to transform the methodology used for drug discovery by guiding the search for effective treatments for diseases.
Professor Hespanha's: